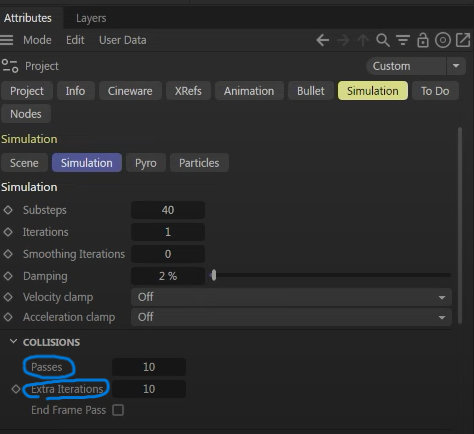
파란색 동그라미 친부분의 역할이 조절했을때 큰차이가 안느껴져서 정확히 어떤건지 궁금합니다!




| 첨부 '1' |
|---|
파란색 동그라미 친부분의 역할이 조절했을때 큰차이가 안느껴져서 정확히 어떤건지 궁금합니다!

너무 감사합니다 개념이 이해가 되었습니다!
Substep값은 전체적인 계산을 설정하는 걸 말하는 건가요?
아마 모그라프가 아닌 시뮬레이션에 대한 질문이실 것 같아요!
위에 바이진님이 정확히 말씀해주셨는데, 좀 더 쉽게 얘기하자면
passes : 물리 시뮬레이션 계산을 프레임당 얼마나 많이 할것인가 - 더 정확한 결과물을 보여줌
extra iteration : 시뮬레이션 계산 결과를 부드럽게 다듬기
이렇게 됩니다. 그럼 무조건 높은게 좋은건가요?
라고 한다면 passes 값이 높을수록 시뮬레이션 계산에 소요되는 시간이 너무 길어지고, 종종 억지스러운 결과물이 나오기도 합니다.
iteration 역시 값이 너무 높으면 부드러움+다듬기가 과하게 들어가 섬세하지 못한 결과물이 나옵니다
그래서 저같은 경우 일단 기본값을 두고 시뮬레이션을 실행 한 다음
1. 물체끼리 뚫리거나 무튼 시뮬이 잘 안되네? passes값을 올림
2. 파들파들 떨리네 ? iteration 값을 올림
이런식으로 진행하고 있습니다
| 번호 | 분류 | 제목 | 글쓴이 | 날짜 | 조회 수 |
|---|---|---|---|---|---|
| 공지 | 일반 | Cinema 4D Education 학생용 라이센스 사용방법 2 | 그래바 | 2020.09.03 | 59089 |
| 공지 | Octane |
옥테인 크래시 관련 자주 올라오는 질문들과 해결하는 법을 정리해보았습니다.
16 |
이효원 | 2020.04.19 | 86980 |
| 공지 |
[필독] 단톡방 질문 방식 관련 공지사항
4 |
권오훈 | 2019.06.27 | 41926 | |
| 공지 | 일반 | [필독] 질문 게시판 유의사항 ! | 권오훈 | 2019.06.27 | 38078 |
| 28094 | Octane | Octane render 뷰포트에서 휠 줌인 줌아웃이 안먹힙니다!!!! 3 | 둑구 | 2025.07.04 | 70 |
| 28093 | 일반 | 100 완료 c4d 사용시 컴퓨터 프리징 현상 원인이 뭘까요? 8 | J5JAE | 2025.07.04 | 77 |
| 28092 | Octane | 50 완료 octane render 에서 node 에 delect key가 작동하지 않아요!!!!!!!!! 2 | 토잉 | 2025.07.03 | 48 |
| 28091 | 모델링 | 꼭 캐릭터 모델링을 시포디로 해야하나요 1 | 서젤리 | 2025.07.03 | 111 |
| 28090 | Octane |
50
완료
너무 답답해 미칠거 같습니다 (진짜 눈물남)
5 |
토잉 | 2025.07.03 | 166 |
| 28089 | Renderer |
완료
렌더링은 되는데 픽쳐뷰어 화면이 안보여요
1 |
묘미미 | 2025.07.03 | 62 |
| 28088 | 시뮬레이션 |
완료
cloner를 스플라인에 입혀 시뮬레이션을 하려고 했는데 문제가 생겼습니다
2 |
우잔 | 2025.07.02 | 149 |
| 28087 | Octane | 50 완료 혹시 옥테인 렌더 설정값은 따로 저장 못하나요? 2 | 토잉 | 2025.07.02 | 74 |
| 28086 | 모델링 |
80
시포디 모델링 BACK 이미지 어디서 찾나요
4 |
상도레미 | 2025.07.02 | 92 |
| 28085 | 모델링 |
subdivision surface 깨짐
완료
subdivision surface 깨짐
3 |
키킼카카 | 2025.07.02 | 82 |
| » | 일반 |
모그라프 관련질문입니다!
4 |
끄러 | 2025.07.01 | 69 |
| 28083 | Octane |
50
완료
옥테인 렌더시간 원래 이런가요? ㅠㅠ!!!
3 |
토잉 | 2025.07.01 | 131 |
| 28082 | 모델링 | 80 케릭터 리깅할때 케릭터 모델링 과정이 궁금합니다 2 | 상도레미 | 2025.07.01 | 73 |
| 28081 | 일반 | 렌더링이란 원래 이렇게 느리고 인내심이 필요한건가요..? 2 | jerryjerry | 2025.07.01 | 74 |
| 28080 | 텍스쳐 |
텍스쳐 내보내기가 안돼요 ㅠㅠ
1 |
파이팅하는사람 | 2025.07.01 | 33 |

 subdivision surface 깨짐
subdivision surface 깨짐
 옥테인 렌더시간 원래 이런가요? ㅠㅠ!!!
옥테인 렌더시간 원래 이런가요? ㅠㅠ!!!


해당 메뉴를 마우스 우클릭해서 헬프 들어가시면 상세 설명 있습니다.
*헬프 발췌 내용입니다.
Passes[0..1000]
빠르게 움직이는 직물이 원통과 충돌합니다. Passes가 0이면 왼쪽에는 관통이 있고, 오른쪽에는 관통이 없으며 값은 5입니다.
이 값은 애니메이션 프레임당 충돌 감지 빈도를 정의합니다. 충돌이 감지되면 충돌 제약 조건이 동적으로 일시적으로 생성됩니다
(정밀도는 다음 두 매개변수로 제어 가능). 이 제약 조건은 태그를 가진 객체가 다른 충돌 지오메트리(또는 자체 충돌 지오메트리)
를 관통하지 못하도록 합니다.
여기에 값을 1로 정의하면 시뮬레이션 프레임의 시간적 시작 부분에서 충돌 감지가 수행됩니다. 생성된 모든 충돌 제약 조건은
다음 충돌 감지 시점까지 유지되며, 각 하위 단계에 대해 고려 및 평가됩니다.
특히 빠르게 회전하거나 일반적으로 비선형으로 움직이는 지오메트리의 경우 이 값을 높이는 것이 유리할 수 있습니다.
거의 모든 관통에 대해 Passes를 높이는 것이 도움이 될 수 있습니다.
Substeps가 Passes보다 작지 않은지 확인하십시오. 그렇지 않으면 아무 일도 일어나지 않습니다.
참고:
패스를 0으로 설정하면 모든 자체 충돌 및 서로 간의 충돌(예: 강체와의 충돌/강체 간의 충돌)이 꺼집니다.
충돌 객체(즉, 충돌체 태그가 있는 객체)와의 충돌만 작동합니다.
Extra Iterations[0..100]
이 매개변수를 사용하면 패스 및 종료 프레임 패스에서 이전에 발견된 기존 충돌 제약 조건에 대해서만
추가 반복 횟수가 수행됩니다. 이는 충돌을 방지하는 데에도 도움이 됩니다.
패스, 종료 프레임 패스 및/또는 하위 단계를 증가시키기 전에 먼저 이 옵션을 활성화해 보세요.
이 정도면 충분할 수 있습니다. 추가 반복 횟수는 비교적 빠르게 계산될 수 있습니다.