



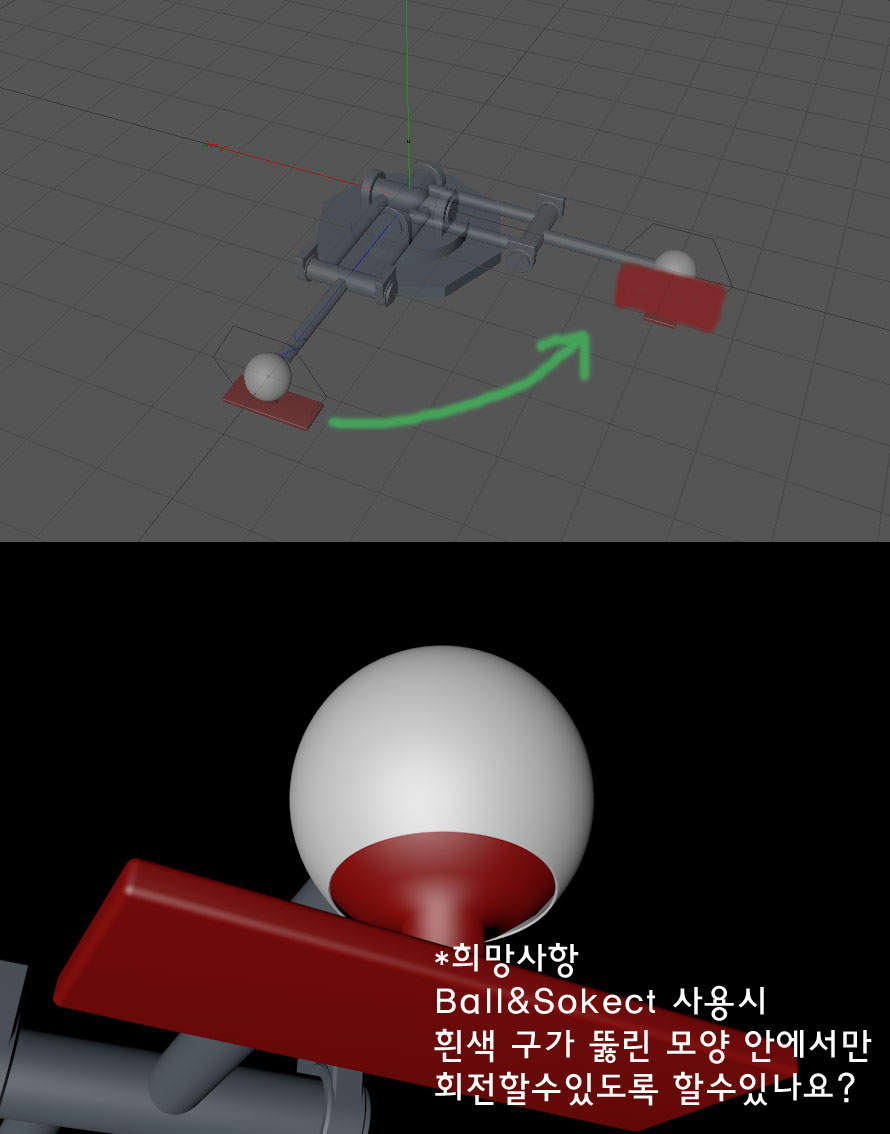
로봇팔로 물건을 옮기는 애니메이션을 하려는데..
현재는 원래 위치에서 화살표쪽으로 가면 빨간판이 세로로 돌아가는데..
화살표 방향으로 가도 가로방향이 되도록 하려면 뭘 건드려야할지 모르겠습니다.
일단 두가지 생각한건 엑스프레소중에 Negate라고 모든 값을 무효화 시키는 명령어에
로테이션,포지션값을 넣어봤는데..뭔가 이상하게 돌아가서 실패했고..
아니면 시뮬레이션 힌지중에 볼&소켓형식이 있던데 그걸 하니까
정말 자기 멋대로 움직여서 실패했네요..;;
다른 좋은 방법 있으면 좀 알려주시면 감사하겠습니다.
*프로젝트 파일 첨부했고 팔 조종은 맨밑에 골이나 로봇팔 조종 널로 할 계획입니다.
 손바닥 리깅시 손바닥의 살접힘표현에 대해서입니다.
손바닥 리깅시 손바닥의 살접힘표현에 대해서입니다.





제가아는 경우에서는
일단 박스를 constraint 태그에서 aim 으로 타겟설정없이 적용하면 되긴되는데요
좀더 복잡한 동작에서는 처음의 축보다 틀어는 경우가 있네요
고수님들께서 좀 더 명확한 답변을 해주시겠죠?
Arm_02.zip