저번 버젼에 이어, 이번에는 오브젝트의 포인트 레벨로 진동하는 코드를 작성하였습니다.
저번과 달라진 점은, 오브젝트 전체를 움직이는 것이 아니라, 사용자가 선택한 포인트가 진동하도록 구현하였습니다.
* 아래 코드의 노란 형광펜으로 하일라잇 시킨 부분이 본 버젼의 핵심이라고 할 수 있겠습니다.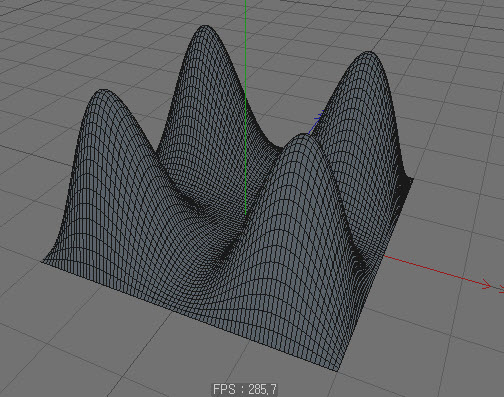
|
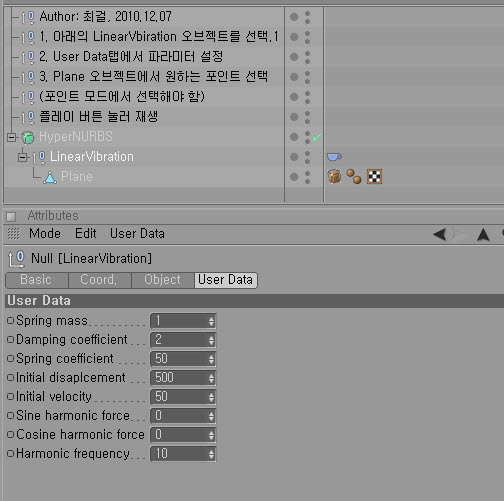
class Complex { public: var var1,var2,var3, Re, Im; Multiply(var1,var2); Divide(var1,var2); Real(var1); Imaginary(var1); Conjugate(var1); RealToComplex(var1); } Complex::Multiply(v1,v2) { var3 = vector(v1.x*v2.x - v1.y*v2.y, v1.x*v2.y + v2.x*v1.y, 0); return var3; } Complex::Divide(v1,v2) { var denominator = pow(v2.x,2) + pow(v2.y,2); var3 = vector((v1.x*v2.x + v1.y*v2.y)/denominator, (-v1.x*v2.y + v2.x*v1.y)/denominator, 0); return var3; } Complex::Real(v1) { Re = v1.x; return Re; } Complex::Imaginary(v1) { Im = v1.y; return Im; } Complex::Conjugate(v1) { v1.y = -v1.y; return v1; } Complex::RealToComplex(v1) { if(typeof(v1)!=2) { return null; } return vector(v1,0,0); } main(doc,op) { // Step 1 var obj = op->GetDown(); var frame = doc->GetTime()->GetFrame(doc->GetFps()); frame = frame/doc->GetFps(); var i,j,pos; var m = op#ID_USERDATA:1; // spring mass var c = op#ID_USERDATA:2; // damping coefficient var k = op#ID_USERDATA:3; // spring coefficient var x0 = op#ID_USERDATA:4; // initial displacement var f1 = op#ID_USERDATA:5; // sine harmonic force var f2 = op#ID_USERDATA:6; // cosine harmonic force var w = op#ID_USERDATA:7; // harmonic frequency var v0 = op#ID_USERDATA:8; // initial velocity // For complex numbers var cM = vector(m,0,0); var cC = vector(c,0,0); var cK = vector(k,0,0); var cX0 = vector(x0,0,0); var cF1 = vector(f1,0,0); var cF2 = vector(f2,0,0); var cW = vector(w,0,0); var cV0 = vector(v0,0,0); // Step 2 var a = new(Complex); var var1 = vector(f1,f2,0); var var2 = vector(k-m*pow(w,2),c*w,0); var var3 = a->Divide(var1,var2); var Re = a->Real(var3); var Im = a->Imaginary(var3); var cA = var3; var tmp = pow(c,2) - 4.0*m*k; var r = vector(0,0,0); if(tmp >= 0) { r = vector(sqrt(tmp), 0, 0); } else { r = vector(0, sqrt(-tmp), 0); } var s1 = (-cC+r)/(2.0*m); var s2 = (-cC-r)/(2.0*m); // Step 3 var X0 = Re; var V0 = a->Imaginary(a->Multiply(var3,vector(0,w,0))); // Step 4 var denominator = a->Real(a->Multiply(s2-s1, a->Conjugate(s2-s1))); var tmp1 = a->Multiply(s2, a->RealToComplex(x0-V0)); var tmp2 = a->Multiply(s1, a->RealToComplex(x0-V0)); var numerator1 = a->Multiply((tmp1 - a->RealToComplex(v0-V0)),a->Conjugate(s2-s1)); var numerator2 = a->Multiply((a->RealToComplex(v0-V0) - tmp2),a->Conjugate(s2-s1)); var p1 = numerator1/denominator; var p2 = numerator2/denominator; // Step 5 var X = a->Real(a->Multiply(cA, vector(cos(w*frame),sin(w*frame),0))); var V = a->Real(a->Multiply(cA, vector(-w*sin(w*frame),w*cos(w*frame),0))); // Step 6 var xx = X + a->Real(a->Real(a->Multiply(p1,a->Multiply(a->RealToComplex(exp(s1.x*frame)), vector(cos(s1.y*frame),sin(s1.y*frame),0)))) + a->Multiply(p2,a->Multiply(a->RealToComplex(exp(s2.x*frame)),vector(cos(s2.y*frame),sin(s2.y*frame),0)))); // Step 7: Set the new y-position of the selected point var p_sel = obj->GetPointSelection(); var p_sel_cnt = p_sel->GetCount(); var pnt = obj->GetPoints(); var pnt_cnt = obj->GetPointCount(); if(pnt_cnt == 0 || p_sel_cnt == 0) return false; var pos; for(i=0 ; i<pnt_cnt ; i++) { pos = pnt[i]; if(p_sel->IsSelected(i)) { pos.y = xx; } else { pos.y = 0; } pnt[i] = pos; } obj->SetPoints(pnt); obj->Message(MSG_UPDATE); } |

 태양계 구현하기 (엑스프레소)
태양계 구현하기 (엑스프레소)
 한 오브젝트를 다른 오브젝트의 포인트에 순차적으로 붙이기(COFFEE)
한 오브젝트를 다른 오브젝트의 포인트에 순차적으로 붙이기(COFFEE)
