프로젝트파일을 첨부해주세요. 이미지 첨부시 본문삽입을 꼭! 해주세요.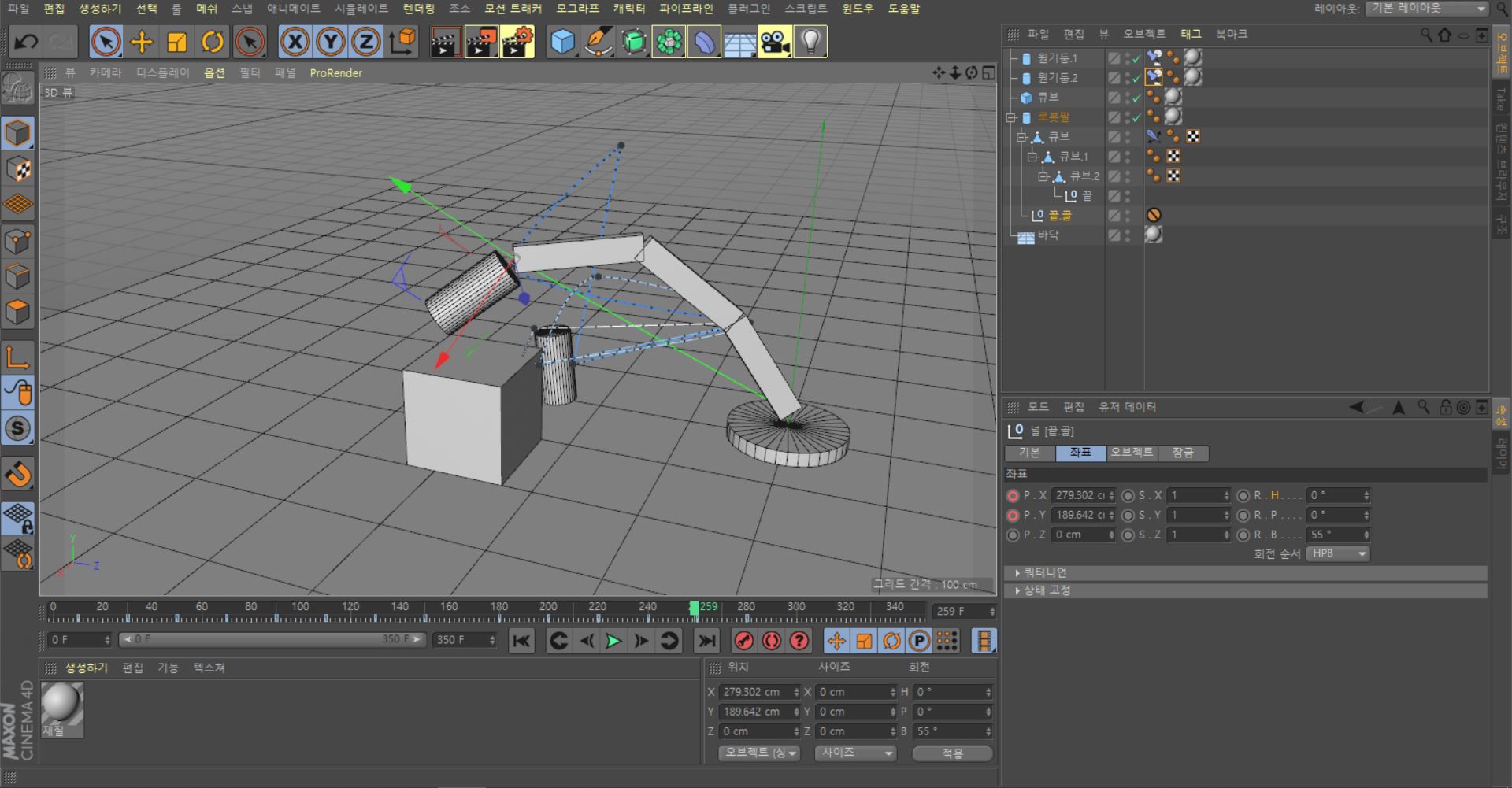
시네마포디를 처음 공부하기 시작하면서 처음 가입했습니다. 반갑습니다.
로봇팔을 만들어서 하고있는데 저 원기둥을 바닥에서 큐브로 옮겼습니다.
원기둥에 구속태그를 시켜서 했는데, 저 원기둥을 옮기면 저 원기둥이 똑바로 서있었으면 좋겠는데..
기울어진 상태로 멈춰요. 어떻게 해야하나요?
프로젝트파일을 첨부해주세요. 이미지 첨부시 본문삽입을 꼭! 해주세요.
시네마포디를 처음 공부하기 시작하면서 처음 가입했습니다. 반갑습니다.
로봇팔을 만들어서 하고있는데 저 원기둥을 바닥에서 큐브로 옮겼습니다.
원기둥에 구속태그를 시켜서 했는데, 저 원기둥을 옮기면 저 원기둥이 똑바로 서있었으면 좋겠는데..
기울어진 상태로 멈춰요. 어떻게 해야하나요?
 렌드링시 mov 파일 저장하기 않돼요?2
렌드링시 mov 파일 저장하기 않돼요?2
 해파리 다리가 이상하게 움직입니다 뭘 만져야 할까요?4
해파리 다리가 이상하게 움직입니다 뭘 만져야 할까요?4
 다이나믹 바디에 자가충돌 해체하는거 영어로 어디에 있는지 아시는 분ㅠㅠ!!1
다이나믹 바디에 자가충돌 해체하는거 영어로 어디에 있는지 아시는 분ㅠㅠ!!1
 로봇팔 구속 태그 공부 중 질문이 있어요1
로봇팔 구속 태그 공부 중 질문이 있어요1
 쇠- 물방울 재질 체인지 어떻게 해야할까요?!2
쇠- 물방울 재질 체인지 어떻게 해야할까요?!2
표현이 목적이기때문에 진짜로 잡을 필요는 없습니다.
실린더는 총 3개가 필요한데 아래, 로봇팔에, 큐브위에, 이렇게 3개를 놓고 서로 보이고 감추고 하는게 가장 편한 방법입니다.
진짜로 컨스트레인트로 해야한다면 컨스트레인트의 스트렝스에 키주는게 방법이지만, 경험상 꼬이는 경우가 많았습니다.